


우리가 늘 접하는 지구상의 생명체가 로봇이라는 기계적인 형태의 모습으로 나타날때마다, 우리는 그 놀라움과 그에대한 관심을 놓지 못한다. 최근에 미디어에도 자주 등장하고 있는 2족보행 로봇은 더욱더 그러하다. 특별한 기능도 없는 그런 로봇들에 대한 기대감은 에너지 소비가 뛰어난 하이브리드 자동차에 대한 기대감과는 다른 무엇이 있다. 도데체 왜 아무런 실질적 도움도 받지 못하는 생명체를 가장한 로봇이 사람들에게 관심과 사랑을 받는 것일까? 그것은 감성디자인의 측면에서도 이해하고 풀어내기 힘든 근원적이며 본능적인 문제가 있다.
메카모 시리즈는 닛산자동차의 설계자로 도요타 자동차의 기술고문으로 활동했던 토미야 류이치(富谷龍一)와 일본 로봇공학의 일인자인 토쿄 공과 대학의 모리마사 히로시(森正弘) 교수가 공동으로 개발한 기계로봇의 원형이다. 메케니컬(Mechanical)과 애니멀(Animal)의 합성어로 "메카니멀(Mechanimal)" 불리게 되는 이 로봇의 개발은 얼마나 적은 에너지로 다양하고 복잡한 움직임을 만들어 낼수 있는가에 대한 실험이었다. 결국 하나의 모터로 크랭크와 기어들을 통해 지금의 메카모 시리즈가 완성되면서 단지 연구과제로서가 아닌 상품성에 대한 실마리도 얻게 된다.1968년부터 개발을 시작한 메카모는 4년후인 1972년 Gakken사에서 Mechamo라는 이름으로 발매를 시작하게 된다.
움직임 자체에 대한 연구가 베이스가 아니었기 때문에 곤충이라는 생물과 메카모를 연결되게 된것은 단순히 모터와 기어들의 조합으로 움직이는 메카니즘이 결론적으로 곤충에 닮아있다는 사실로 인해 제작된 것이다. 메카모시리즈중 가장 다리가 많은 Centipede(지네)는 그런 연구결과를 시각적으로 가장 잘 살펴볼수 있는 모델이다.
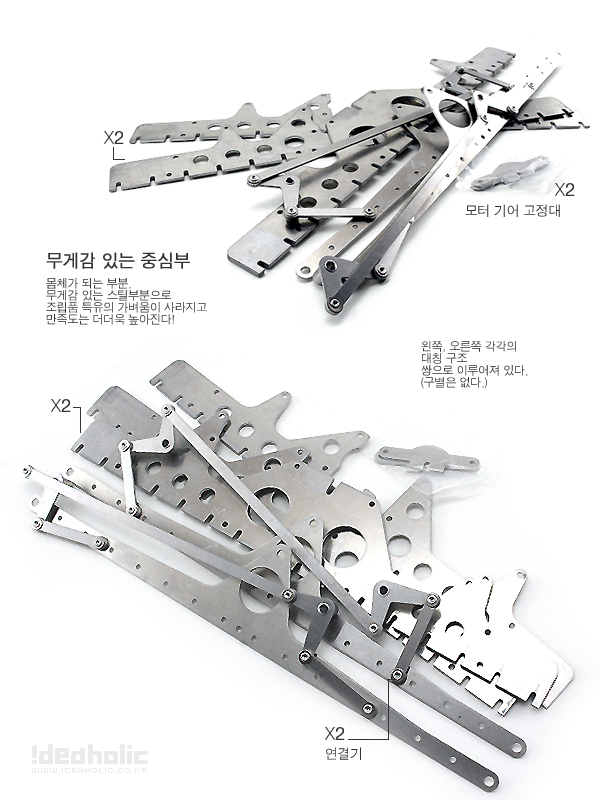

컨셉과 형태에서 느껴지는 친근함과는 달리 제작하는 과정에서 상당한 테크닉과 인내를 요하는 모델이다. 특히 이번 70년대의 제품을 복각판으로 다시 제조하는 과정에서 0.7mm연철 도금에서 1.5mm알루미늄으로 바뀌면서 제품의 재질이 향상되었으며 이전의 유선 컨트롤러가 적외선을 사용하는 무선 컨트롤러로 교체되었다. 초기 버전에 비해 비용절감이나 제작과정의 단순화를 이루기위해 부품수를 줄였다고는 하지만, 센티피드의 패키지를 개봉해보면 여전히 많은 작은 부품들이 들어있어 소비자를 잠시 당황하게 하기도 한다. 일단 소형 스패너와 드라이브가 들어 있기 때문에 조립을 위해 별도의 공구가 요구되지 않는다. 보통 성인의 작업속도로는 약 3~4시간 정도 쉬지않고 제작한다면 완성할수 있는 정도다.
크랭크와 기어를 통한 움직임이 제일 중요한 포인트이기 때문에 몸체 양쪽에 부착되어지는 각 16개의 다리제작에 대한 내용이 가장크다. 그리고 조립과정에서 가장 어려운 부분이 바로 32개의 다리를 몸체의 배면에 조립하는 과정인데, 부시와 와셔를 8mm나사에 끼워서 연결하기 때문에 순간 몸체와 연결하려는 다리와의 평행을 유지하는 것이 매우 중요하다

사용설명서를 자세히 읽지 않으면 컬러나 위치(다리는 크랭크에 쓰여있는 번호대로 제작해야함)로 구분되는 각 부품들을 잘못 조립할 경우 아예 모터의 동작자체가 이뤄지지 않는 난감한 경우가 발생하고 또다시 수십개의 나사를 풀르고 조이는 노동을 감행해야 불상사가 발생한다. 확실한 조립을 했다고 생각해도 부분조립후 수동으로 모터를 움직여 각각의 크랭크가 제대로 작동하는지 확인하는 수고가 필요하다.

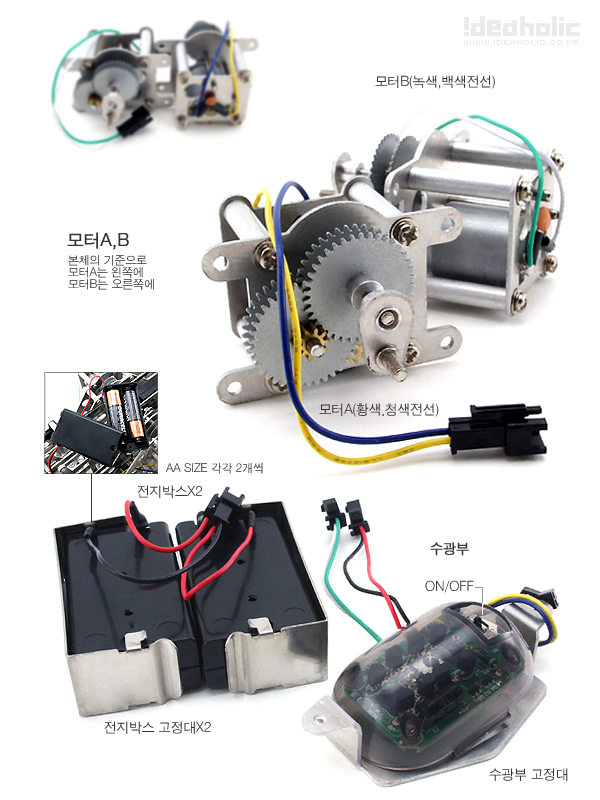
조립이 완료되면 컨트롤러와 센티피드 본체의 가운데 수납되는 배터리 박스에 각각 2개 4개의 AA사이즈 배터리를 넣고 동작을 준비한다. 메카모는 기계생물이라는 오리지널리티를 더하기위해 별다른 외부 케이스가 없고 기기내부가 모두 밖으로 드러나는 디자인이기 때문에 외부로 노출된 기어박스에 대한 주의가 동작전에 필수적으로 요구된다. 제작하는 것도 어렵지만 동작에 있어서도 메카모는 단순히 장난감이 아닌 과학교재로서의 접근이 필요한 상품으로 생각된다.

무선컨트롤러를 사용하기위해 머리쪽에 해당하는 수광부의 전원을 켜면 이제 물결치든 아름답게 수많은 다리를 땅을치면서 움직이는 센티피드를 감상할수 있다. 전진/후진 커멘드를 입력하면 양쪽의 모터가 모두 한쪽으로 돌아가며 좌/우 이동의 경우 한쪽 모터만 제자리 돌기의 경우 양쪽모터가 다른방향으로 이동하게끔 되는 일종의 탱크의 컨트롤과 같은 방식이지만 탱크와는 달리 컨트롤 조그가 하나밖에 없다. 어짜피 게임이나 놀이를 위한 제품이 아닌 동작 그자체에 대한 신비로움을 풀고자 발매된 모델이기 때문에 오히려 조그하나로 모든동작을 이룰수 있다는 사실이 신비롭기까지 하다.

수광부가 부착되어 있는 본체와의 교신을 위해서는 일정거리(약1m이내)와 수신기의 방향성을 유지해야만 정확히 명령한 동작을 수행할수 있다. 적외선의 특성상 조금이라도 수신기와 송신기사이에 장애물이 있거나 커멘드하는 컨트롤러의 방향이 명확하지 않으며 있으면 센티피드는 금새 교신이 중단되고 동작이 중단되어 버린다. 물론 이경우 보통의 RC처럼 전파수신 범위를 넘어가면 스스로 오작동을해 멋대로 움직이거나 하지는 않기 때문에 안정성에 있어 장점을 가진다.

이동속도는 그리 빠른편이 아니지만 육중한 사이즈의 완성된 센티피드의 움직임을 관찰하는 일은 무척이나 신비롭고 재미있다. 더구나 내가 알고 있는 지네의 모습을 이렇게 커다란 메케니컬한 기계장치로 다시 바라보게 되는 일은 실로 새롭기까지 하다. 조립을 하면서 느끼게되는 지네의 움직임을 본딴 센티피드의 구조는 단지 만들고 끝나는 보통의 RC제품과는 상당히 다른 그런 과학적이면서 교육적인 측면을 가지고 있다. 도데체 하나의 모터로 어떻게 16개의 다리를 움직일수 있다는 것인지, 왜 45도가 휘어진 축으로 연결되었는지 그리고 어떻게 제자리에서도 회전할수 있는지에 대한 의문은 그저 책을 읽고 머리속으로 이해하는 것보다 훨씬더 빠르게 체험하게 되었다. 그것은 이 늦은밤 저녁도 거른체 기계생명체에 몰입할수 있었던 4시간이라는 제작시간이 전혀 고통스럽지도 힘들지도 않은 이유이기도 하다.



제조업과 공학도의 미래가 불투명한 우리나라의 여건에서 비추어보면 이런 메카모의 개발비화나 제조에 대한 이야기는 아마도 꿈과 같은 일일지도 모르겠다. 그래서 이런 제품들을 살피다보면 때로는 화가날때도 때로는 슬플때도 많다. 그건 아마도 하나둘씩 떠나가는 국내 유수의 기술자들을 해외로 내몰고있는 현실보다 성숙된 연구진들을 배출해내하는 토양을 가꾸지 않고 있는 현실이 답답해서 일게다.